探索ROS2的性能(4)
时间:2023-03-01 17:32 来源:网络整理 作者:默认发布 点击:次
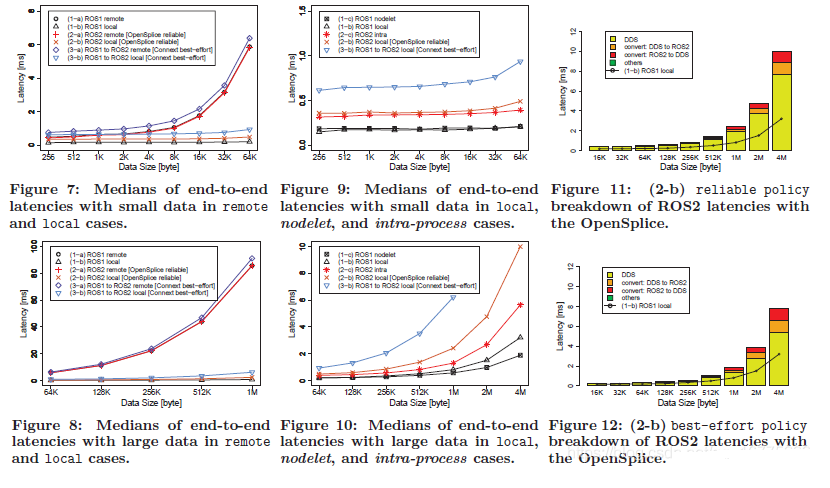
表4中另一个有趣的观察结果是ROS2在传输大数据时存在许多问题。在ROS2的各种情况下,许多实验都失败了;但是,我们可以观察到Connext和OpenSplice之间的性能差异。这些对大数据的约束源于Connext和OpenSplice的最大有效载荷为64 KB。这是IP协议的最大包大小。默认情况下,使用QoS策略维护分段数据包很困难。因此,我们认为DDS不是为处理大数据而设计的。这对于分析ROS2性能很重要。例如,FastRTPS不支持大数据,因为它被设计为嵌入式系统的轻量级实现。即使是256 B的字符串也超过了FastRTPS中的最大长度。许多DDS供应商不支持使用可靠的连接和通用API发布大数据。为了发送和管理分开的数据包,这些DDS供应商提供了一个备用API,例如异步发布者和流控制器,它们尚未从ROS2中抽象出来。在我们的实验中,当数据大于64 KB时,具有可靠策略的Connext会产生错误。尽力而为策略的一些失败是由于不可靠通信导致的频繁消息丢失。当发布节点不能将数据传输到订户节点时,我们无法收集足够的样本并进行评估。若干评估在(3-b)和远程通信中失败,如表4所示。目前,上述结果表明ROS2不适合处理大型消息。 3.3 Latency Characteristics of ROS1 and ROS2 如图7,图8,图9,图10所示,在图5所示的每种情况下,都清楚了端到端延迟特性的趋势。在(2-a)和(2-b)中,ROS2使用OpenSplice和 可靠的策略,因为ROS1使用TCPROS,即可靠的通信。 在(3-a)和(3-b)中,为了评估具有大数据(例如,512KB和1MB)的等待时间,使用具有尽力而为策略的Connext。 首先,我们分析ROS2与ROS1相比的性能。 然后,我们使用不同的DDS实现和配置(例如QoS策略)来评估ROS2。 3.3.1 Comparison between remote and local cases ROS1和ROS2远远小于远程和本地通信之间的差异。图7和图8显示了远程和本地病例的延迟中位数。由于从ROS1到ROS2以及从ROS2到ROS1的转换影响是相似的,图7和8包含单向数据。在图7中,所有延迟的行为始终为4 KB。相反,远程情况下的延迟从16 KB急剧增长,如图7和图8所示。这是因为ROS1和ROS2将消息分成15 KB数据包以通过以太网传输数据。远程和本地情况之间的这种差异对应于Machine1和Machine2之间的数据传输时间,这是在初步实验中测量的。初步实验使用ftp或http测量每个数据大小的传输时间。该对应关系表明RTPS协议和QoS策略数据对网络中的数据传输时间影响很小。此外,通过测量数据传输时间可以预测所有延迟。 3.3.2 Comparison among local, nodelet, and intraprocess cases
在小数据和大数据的情况下,延迟特性不同。为了便于讨论,我们将图分为图9和图10,它们显示了本地回环和共享内存传输的端到端延迟的中位数。这是因为消息是否被分成几个数据包是考虑端到端延迟的导入问题。 对于小于64 KB的数据大小,会观察到ROS2的持续开销,如图9所示,因为DDS需要对QoS策略进行编组各种配置和决策。无论数据大小如何,我们都会在延迟和QoS策略之间进行权衡。尽管QoS策略产生了不可避免的开销,但延迟是可预测的并且很小。由于ros_bridge交易,(3-b)有很大的开销。在(3-b)情况下,ros_bridge导致与ROS1和ROS2通信的开销更大。 对于大数据,ROS2具有显着的开销,具体取决于数据的大小,如图10所示。(2-b)中ROS2的开销归因于两个因素,即DDS的数据转换和处理DDS。注意,(2-a)和(2-b)中的ROS2必须两次转换ROS2和DDS之间的消息。一次转换是从ROS2到DDS,另一种转换是从DDS到ROS2。在这些转换之间,ROS2调用DDS API并将消息传递给DDS。图11和图12显示了(2-b)OpenSplice 在reliable策略和best-effort策略中端到端延迟的细分。我们观察到ROS2仅需要转换和处理DDS。如图11和12所示,“其他”几乎没有交易。此外,请注意,数据大小会影响转换和DDS处理。与ROS1相比,DDS开销不是恒定的,并且DDS的影响在大数据时是显着的。因此,ROS2在大数据时具有显着的开销,而DDS的影响取决于QoS策略。 (责任编辑:admin) |