探索ROS2的性能
时间:2023-03-01 17:32 来源:网络整理 作者:默认发布 点击:次
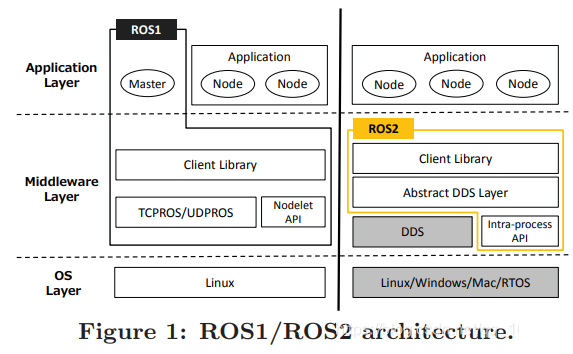
ROS2测评——探索ROS2的性能 作者:不懂音乐的欣赏者 9 次浏览 1 次 2023-3-2 编辑推荐: 本文主要介绍了ROS2的性能。希望对你的学习有帮助。 本文来自于CSDN,由火龙果软件Linda编辑,推荐。 1. INTRODUCTION 近年来,诸如自动驾驶车辆的实时分布式嵌入式系统变得越来越复杂和多样化。 自2007年11月3日DARPA城市挑战赛以来,自主驾驶引起了人们的关注[34]。 机器人操作系统(ROS)[28]是开源中间件,经历了快速发展[11],并已广泛用于机器人应用(例如自动驾驶系统)。 ROS几乎完全是从头开始构建的,自2007年以来一直由Willow Garage [7]和开源机器人基金会(OSRF)[2]维护.ROS提高了生产力[12],提供发布/订阅传输,多个库(例如 ,OpenCV和Point Cloud Library(PCL)[3]),以及帮助软件开发人员创建机器人应用程序的工具。 Contribution: 在本文中,我们提供了DDS方法对ROS的概念证明。我们阐明了ROS1和ROS2在各种情况下的数据传输性能。性能意味着延迟特性,吞吐量和分布式功能。关注DDS功能,根据DDS供应商和配置,我们从各个方面探索和评估潜在和约束:延迟,吞吐量,线程数和内存消耗。从实验结果中,我们安排指南以及我们可以采取哪些措施来解决当前的约束问题。据我们所知,这是第一项探索ROS2性能的研究。 但是,ROS不满足实时运行要求,只能在少数操作系统上运行。此外,ROS无法保证容错,期限或进程同步。此外,ROS需要大量资源(例如,CPU,内存,网络带宽,线程和核心),并且无法管理这些资源以满足时间限制。因此,ROS不适用于实时嵌入式系统。许多研究团体已经考虑过这个关键问题,包括ROS开发人员,并且已经提出并评估了各种解决方案[13],[19],[36]。但是,这些解决方案不足以解决ROS对实时嵌入式系统的限制。 为了满足现在更广泛的ROS社区的需求,ROS将对ROS2进行重大升级[23]。 ROS2将考虑以下新用例:实时系统,小型嵌入式平台(例如传感器节点),非理想网络和跨平台(例如,Linux,Windows,Mac,实时操作系统(RTOS),否则OS)。为了满足这些新用例的要求,将重建现有版本的ROS(以下简称ROS1)以改进用户界面API并采用新技术,如数据分发服务(DDS)[24],[30],Zeroconf ,协议缓冲器,ZeroMQ,Redis和WebSockets.2 ROS1传输系统将被DDS取代,DDS是一种行业标准的实时通信系统和端到端中间件。 DDS可以提供类似于ROS1的可靠发布/订阅传输。 DDS适用于实时嵌入式系统,因为它具有各种传输配置(例如,期限,可靠性和耐久性)和可扩展性。 DDS满足分布式系统的安全性,弹性,可扩展性,容错性和安全性要求。 DDS可以通过减少库大小和内存占用,为某些实时环境和一些小型/嵌入式系统提供解决方案。由不同的DDS供应商开发,该通信系统的若干实现已经用于任务关键环境(例如,火车,飞机,船舶,水坝和金融系统)并且已经由NASA和美国国防部验证。研究人员[37],[32]和DDS供应商已对几种DDS实施进行了评估和验证。这些评估表明DDS既可靠又灵活。 Organization: 本文的其余部分安排如下。第2节提供了背景信息,并描述了ROS和DDS系统模型。第3节验证了实验情况,并评估了ROS1和ROS2在各种配置下的性能。第4节讨论相关工作。最后,第5节总结了论文,并为未来的工作提出了建议。 2. BACKGROUND 在本节中,我们提供背景知识。 首先,我们描述了与ROS1相比的ROS2系统模型,重点是其通信系统。 然后,我们回顾ROS的各个方面,例如发布/订阅模型。 最后,我们描述了DDS,它被用作ROS2中实时系统的通信系统。
2.1 Robot Operating System (ROS) (责任编辑:admin) |